

The circuit of an electric forklift shown in Figure 1 is a schematic diagram of the principle of a DC motor. The magnetic poles N and S are a pair of magnetic poles generated by the main magnetic pole, and the coil abcd represents the armature coil (winding); A and B represent inverters, small squares represent brushes, and U represents the applied power voltage. As shown in Figure 1:
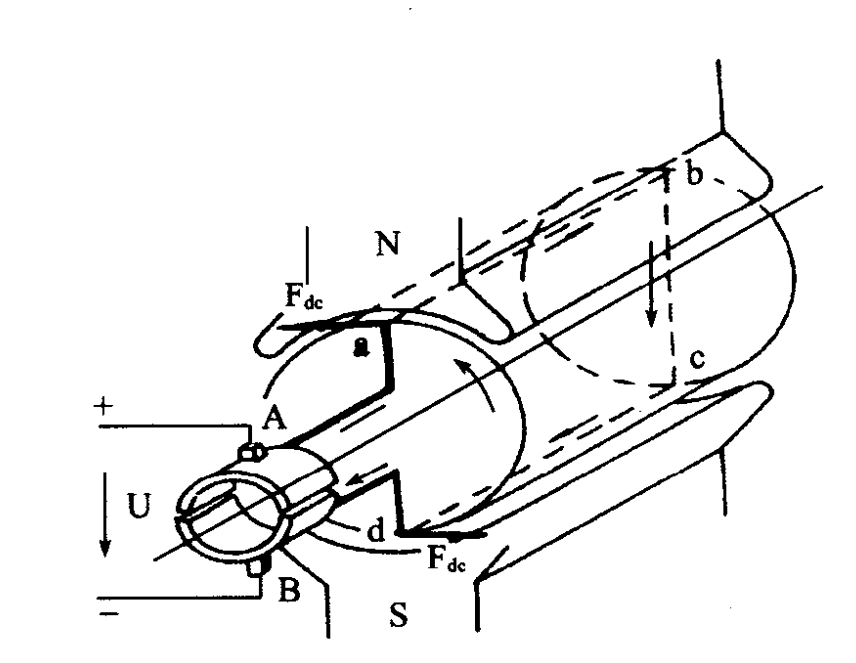
We know that the electrified conductor of an electric forklift motor is subjected to a force in a magnetic field, and the direction of the force is determined using the left-hand rule. The current on edge ab in the figure is from a-b; The current on the edge of cd is cd. Therefore, according to the left-hand rule, it can be determined that the force Fa on edge ab is to the left, while the force F on edge cd is to the right. Therefore, the coil abed is subjected to a counterclockwise rotation torque.
When the DC motor coil abcd rotates 180 degrees, the ab and cd edges align with the position shown in the diagram, and the commutator also rotates 180 degrees with the coil. As a result, the current direction of ab and cd edges is reversed. According to the left hand rule, it is determined that the force on edge cd is to the left, while the force on edge ab is to the right. The coil abcd is still subjected to a counterclockwise torque. Therefore, the coil, along with the armature core, rotates, which is the working principle of a DC motor. So, what factors are related to the torque received by the armature? From the working principle of an electric motor, it can be seen that the greater the magnetic flux generated by the main magnetic pole, the greater the current flowing into the armature winding, and the more windings the armature winding are, the greater the torque received. Since this torque is generated by the interaction between current and magnetism, we call it electromagnetic torque, represented by T. Obviously, the electromagnetic torque T can be expressed as follows:
T=CTIAφ
In the formula: C-and motor structure
I - Current in the armature;
φ— The magnetic flux of a magnetic field.
Due to the magnetic field lines generated by the armature winding (conductor) of the electric forklift DC motor cutting the main magnetic pole during rotational motion, an induced electromotive force is also generated in these windings (conductors). This induced electromotive force is opposite to the direction of the applied voltage, so it is called a back electromotive force, denoted as E. express. The magnitude of the back electromotive force EA is obviously related to the strength of the magnetic field and the speed of the rotation, and its expression is:
EA=CePn
In the formula: Ce - constant related to the motor structure;
Φ—— The magnetic flux generated by the main magnetic pole;
N-speed of an electric motor.
-
 Advantages of Walk-behind Electric Stacker: Zero Noise for Indoor OperationsNoise complaints in offices & clean workshops? Silent brushless stackers ≤60dB with quiet motor, buffer hydraulics & elastic PU wheels for day-night handling.
Advantages of Walk-behind Electric Stacker: Zero Noise for Indoor OperationsNoise complaints in offices & clean workshops? Silent brushless stackers ≤60dB with quiet motor, buffer hydraulics & elastic PU wheels for day-night handling.Do you like ?0
Read more -
 Site Parameters & Applicable Warehouse Area For 1.5t Semi-electric StackerUnsure of warehouse size for semi-electric stackers? 1t model needs 1.6m aisles for 50–800㎡ storage. Compare manual & full-electric types to avoid budget waste.
Site Parameters & Applicable Warehouse Area For 1.5t Semi-electric StackerUnsure of warehouse size for semi-electric stackers? 1t model needs 1.6m aisles for 50–800㎡ storage. Compare manual & full-electric types to avoid budget waste.Do you like ?0
Read more -
 Low-cost Manual Hydraulic Stacker For Small Warehouse Loading WorkLow-budget small businesses: compact manual stackers need no charging, easy for light tasks in shops/basements, unsuitable for heavy frequent work.
Low-cost Manual Hydraulic Stacker For Small Warehouse Loading WorkLow-budget small businesses: compact manual stackers need no charging, easy for light tasks in shops/basements, unsuitable for heavy frequent work.Do you like ?0
Read more -
 How to Extend Battery Runtime of Lithium Stand-on Electric Pallet TruckLithium forklift capacity drops sharply after 2 years? Avoid deep discharge, frequent fast charging & extreme temp charging to extend battery life and cut replacement costs.
How to Extend Battery Runtime of Lithium Stand-on Electric Pallet TruckLithium forklift capacity drops sharply after 2 years? Avoid deep discharge, frequent fast charging & extreme temp charging to extend battery life and cut replacement costs.Do you like ?0
Read more -
 How to Repair Stiff Steering of Stand-on Counterbalance StackerStiff steering causes collisions & injuries. Troubleshoot jammed wheels, limit blockage, dry ball joints & rusted bearings with low-cost DIY repair steps.
How to Repair Stiff Steering of Stand-on Counterbalance StackerStiff steering causes collisions & injuries. Troubleshoot jammed wheels, limit blockage, dry ball joints & rusted bearings with low-cost DIY repair steps.Do you like ?0
Read more -
 Precautions for Using Off-road Walk-behind Pallet Trucks On Construction SitesRough-terrain pallet trucks for muddy construction sites. Full pre-check, operation & maintenance procedures prevent tire punctures, circuit short and frame damage.
Precautions for Using Off-road Walk-behind Pallet Trucks On Construction SitesRough-terrain pallet trucks for muddy construction sites. Full pre-check, operation & maintenance procedures prevent tire punctures, circuit short and frame damage.Do you like ?0
Read more








